激光雷达(Light Detection and Ranging,LiDAR)是一种使用激光脉冲来测量目标与激光发射源之间的距离的技术。它工作原理类似于雷达,但使用光波而非无线电波。通过测量激光脉冲被反射回来的时间,LiDAR能够准确计算出距离,从而生成高精度的三维信息。
LiDAR系统主要由以下几个组件构成:
激光器:产生用于向目标发射的激光脉冲。
扫描器和光学系统:用于引导激光束向特定方向发射,并收集反射回来的光。
探测器(通常是光电二极管):用于检测接收到的反射光。
计算单元:用于处理接收到的光信号,并根据信号的时间差计算距离,最终生成三维图像或地图。

案例1:车载雷达主要组件及原理图

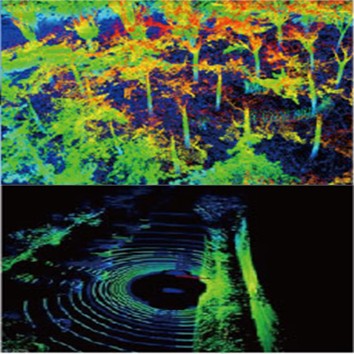
案例2:机载雷达的系统组成
LiDAR技术的应用非常广泛,包括但不限于:
自动驾驶汽车:用于车辆周围环境的感知和障碍物检测。
地形和地貌测绘:在地理信息系统(GIS)中用于创建高分辨率的地形图和高程数据。
林业:测量森林的密度、高度和结构,以进行资源管理和规划。
建筑和城市规划:生成建筑物和城市环境的精确三维模型。
考古:探测和映射古遗址和地形,以揭示隐藏在地表下的结构。
→相关阅读:10个常见的LiDAR应用。
激光雷达的光源通常是特定类型的激光器,其选择取决于应用场景、测量距离和精度要求。常见的光源包括:
· 905nm波段的EEl边发射激光器(Edge-Emitting Laser)
· VCSEL垂直腔面发射激光器
· 基于TOF的1550nm波段脉冲光纤激光器
· 基于FMCW的波长可调谐的半导体激光器
→相关阅读:905nm vs 1550nm 激光雷达性能对比
波长:决定光束穿透能力和对不同物质的反射率
功率:决定探测距离和目标反射率最小的可检测值
脉冲宽度:影响分辨率和精度
重复频率:决定数据更新率和最大测量距离
光束质量:影响激光聚焦能力和传播稳定性
发散角:决定光速是否紧凑,决定检测性能
稳定性和可靠性: 在不同工作条件下的功率和波长稳定情况。
激光雷达可以通过光源、测距原理、探测器以及光束操纵的不同组合有很多种方案。目前一些常见的激光雷达成像方式大体可以分为扫描式与非扫描式。

想要找一款合适的作为雷达的激光器光源?
→ 联系我们
联系人:Lumispot
手机:
电话:+86-510-87381808
邮箱:sales@lumispot.cn
地址: 无锡市锡山经济开发区芙蓉中三路99号瑞云4座7楼


