根据尚普咨询集团数据显示,2020年的全球激光雷达市场规模约为162.1亿元,预计到2026年将达到735.7亿元,在2023年-2026年预测期的复合年增长率为29.55%。主要的卖点在新能源汽车以及智能机器人上面,政府在一些三维测绘领域也会逐步采用激光雷达来获取三维信息,随着未来AI大模型的发展,硬件领域也会随之迭代更新,那么LIDAR的加持是必不可少的,所以说激光雷达的前景还是比较不错的。
激光雷达可以通过光源、测距原理、探测器以及光束操纵的不同组合有很多种方案,如下图所示。每种都有各自的利弊,接下来主要分析光束操纵的一些方案:
| 光源 | 探测器 | 测距原理 | 光束操控 |
LED EEL VCSEL | PIN PD APD/SPAD/SiPM CMOS图像传感器 CCD图像传感器 | 三角测距法 飞行时间测距法 间接飞行时间法 | 机械扫描 DOE(衍射式) 微振镜扫描 OPA扫描 Flash(闪光式) |
这篇文章主要讲述一些目前激光雷达常见的成像方式:
可以大体分为扫描式以及非扫描式;

如上图所示非扫描式,主要分为多线(多激光器)以及Flash;这类都是激光同时照明前方物体,而不是一个角度一个角度地去扫描,这样有个好处就是省去了扫描的时间,可以缩短成像速度。但缺点也很明显,多线需要多个激光器导致成本增大,如果用VCSEL的话,功率也限制了其探测距离不能很远。Flash是直接单个激光照明前方物体,很明显,照不远,因为功率都发散掉了。这类的成像方式适用于短距离的三维成像,例如:汽车的补盲雷达。
目前主要有旋转式扫描、MEMS(微机电系统)振镜扫描、OPA(光束相控阵)还有目前结合透镜的焦平面阵列扫描、以及结合光栅,利用波长调谐来扫描。
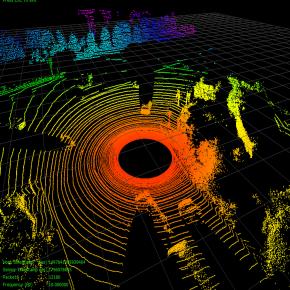
旋转式扫描是最早的一种扫描方式,利用机械转头360°转动,实现360°的扫描,这种方式一般体积比较大、成本高、而且在扫描的时候一直在高速旋转,会有寿命稳定性的问题。优点是实现方式比较简单。
二维扫描的 MEMS 微振镜是激光雷达的关键器件,主要可以通过电热效应、静电效应、电磁效应和压电效应驱动。这种扫描方式也是被各大国内外厂商采用,下面这张图就是在机械旋转的基础上加的一个1D的扫描振镜, 振镜的震动幅度取决于驱动电流的大小以及频率。现在2D的扫描振镜也已发展成熟,MEMS振镜扫描方式重点在于如何减小MEMS微镜的反射面积、以及如何加快扫描频率。该方法也是除了机械旋转扫描最成熟的一种方法。

光学相控阵是一种光束指向技术,原理类似于多缝干涉,激光光束经过分束器进入光波导阵列,在波导上通过外加的方式改变光波的相位,在空间远场相干叠加形成一个具有较强能量的光束,无需机械转动,属于纯固态扫描方式,目前相控阵主要分为液晶相控阵和集成波导相控阵两部分;液晶光学相控阵激光雷达具有很多优势,不需要机械扫描部件,有很大的潜力应用于现代新型激光雷达,但是液晶光学相控阵的扫描角度、扫描速度有待进一步提升,以使满足激光雷达在人工智能领域对于高速(百 kHz 量级以上)、大角度扫描(几十度以上)的需求。硅基集成光学OPA目前主要集中于如何有效减小阵列串扰,提高扫描精度、增大扫描角度、提高热稳定性等问题,而且由于片上功率较低,使得远距离探测存在困难。

光控相控阵扫描基本原理示意图

二维硅基光学相控阵结构示意图
下图是在透镜的焦平面上集成了光开关。通过光开关来调整透镜出射光的角度,出射光的角度范围由两边上光栅的中心距离和焦距决定,光栅阵列放在透镜的焦平面上,角分辨率是由两个光栅之间的距离和透镜的焦距决定的。当然,这个只能实现一维的扫描。
 波束切换方法的方框图和 (b) 波束切换方法的示意图
波束切换方法的方框图和 (b) 波束切换方法的示意图
基于开关的2D光束扫描,功耗logN,N是片上发射器的个数,在氮化硅的平台上,通过一个标准的透镜光纤耦合进波导里,1×N的开光阵列是由级联的1×2的MZI组成,通过热调谐。通过一个光栅的发射器到自由空间,在芯片的顶部,有一个玻璃透镜,其焦平面与光栅发射器阵列的表面重叠。通过光栅的色散实现一个维度的扫描,通过光栅阵列的位置排布实现另一个维度的扫描。如何优化光栅参数,实现更大的色散是一个需要解决的问题。

本篇参考了
《1D MEMS Micro-Scanning LiDAR》2018 Infineon Technologies
《Development of Small Size 3D LIDAR》
《固态激光雷达研究进展》
《Lens-based integrated 2D beam-steering device with defocusing approach and broadband pulse operation for Lidar application》
《Demonstration of a new optical scanner using silicon photonics integrated circuit》
感谢您的阅读, 本文摘自作者:klein99,公众号:Lightigo,如需转载请标明出处。
免责声明:
我们在此声明,我们网站上显示的某些图片是从互联网和维基百科上收集的,目的是促进教育和信息共享。我们尊重所有原创者的知识产权。使用这些图片无意获取商业利益。
如果您认为所使用的任何内容侵犯了您的版权,请联系我们。我们非常愿意采取适当措施,包括删除图片或提供适当的署名,以确保遵守知识产权法律法规。我们的目标是维护一个内容丰富、公平并尊重他人知识产权的平台。
请通过以下联系方式联系我们,电子邮件:sales@lumispot.cn。我们承诺在收到任何通知后立即采取行动,并保证 100%配合解决任何此类问题。
联系人:Lumispot
手机:
电话:+86-510-87381808
邮箱:sales@lumispot.cn
地址: 无锡市锡山经济开发区芙蓉中三路99号瑞云4座7楼